Hvordan Xod hjelper deg med å bygge Arduino-roboter uten koding
Annonse
Å komme inn på DIY Arduino-robotikk kan være skremmende hvis du aldri har kodet før. Uansett hvor storslått ideene dine er hvis du ikke kan programmere mikrokontrolleren din, vil ikke roboten gjøre mye.
Heldigvis er det måter å programmere Arduino uten å skrive en eneste kodelinje. I dag ser vi på grunnleggende robotikk ved bruk av Xod, en åpen kildekode-programmeringsnodebasert Arduino-kompatibel IDE.
Koden-fri robot
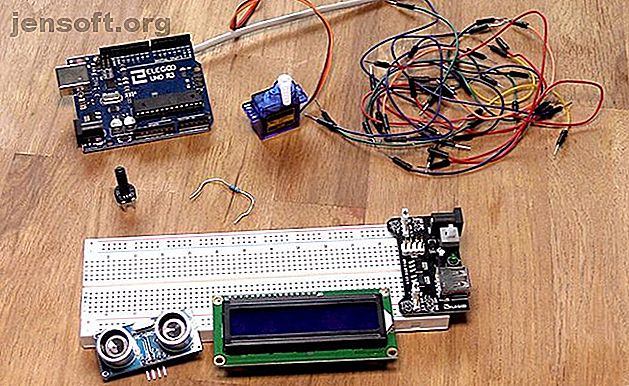
Dagens prosjekt bruker noen standard hobbyrobotikkomponenter for å lage en prototype av en avstandsfølende robotarm. Kombinasjonen av en servo og en ultrasonisk distansesensor er vanlig innen hobbyrobotikk, og du vil legge til en LCD-skjerm.
Det ferdige prosjektet vil logge avstandsverdier på LCD-skjermen, og flytte servoarmen i forhold til avstanden detektert av avstandsdetektoren.
Med litt fantasi er dette en robotarm som prøver å gripe deg hvis du kommer for nær. Skummelt!
Krav til maskinvare

Du trenger :
- Arduino-kompatibelt brett (dette prosjektet bruker en Uno)
- 16 × 2 LCD-skjerm
- HC-SR04 ultralydavstandssensor
- Hobby servo
- 10 k potensiometer
- 220 ohm motstand
- 5v strømforsyning
- Breadboard og hookup ledninger
Det er ganske mange komponenter som kreves for dette prosjektet, men ethvert godt Arduino-startsett bør ha alt du trenger. Jeg fant alt jeg trengte i startpakken Elegoo Uno R3. Alternativt er alle komponentene som er oppført ovenfor superbillige og tilgjengelige for alle gode elektroniske forhandlere av hobbyer.
Sette opp LCD-skjermen

Legg din LCD-skjerm, 10k potensiometer og 220 ohm-motstand til brødbrettet i henhold til ovennevnte Fritzing-diagram.
Å sette opp en LCD-skjerm kan være ganske skremmende første gang du gjør det, men fortsett å referere til diagrammet, så får du det! For å gjøre det enklere, har jeg satt LCD- og Arduino-pinnene til å være nøyaktig de samme som i den offisielle Arduino LCD-opplæringen, så referer også til det hvis du sitter fast.
Legge til servo og ultralydsensor
Legg nå din HC-SR04 ultralydsensor til brødbordet. Koble VCC- og GND- pinnene til 5V og bakkeskinnene på brødplaten. Koble Trig- pinnen til Arduino-pin 7, og Echo- pinnen til 8 .

Neste, fest servo. Ledningsfargene kan variere her, men som en generell regel kobles rød til 5v- pinnen, og brun eller svart festes til GND- pinnen. Datalinjen, som vanligvis er gul eller oransje, kobles til pinne 10 .

Til slutt, koble bakkeskinnen på brødplaten til en av Arduino's GND- pinner. Det er det! Dere er alle satt opp.
Laste ned Xod IDE

Gå til Xod.io og last ned gratis Xod IDE. Det er tilgjengelig for Windows, Mac og Linux. Det er også en nettleserbasert versjon, men siden du ikke kan bruke den til å laste opp Arduino-skisser, vil den ikke fungere for dette prosjektet.
Last ned: Xod IDE for Windows, Mac og Linux
Blink With Xod
Når du åpner Xod for første gang, vil du se veiledningsprosjektet; Alternativt kan du åpne den under Hjelp- menyen. Brett ut velkomst-til-Xod- samlingen i prosjektleseren til venstre, og velg 101-opplasting .

Dette nodeoppsettet er for å teste om kode lastes opp vellykket til Arduino. Den fungerer på samme måte som en Blink-skisse i Arduino IDE. Klokkenoden lager et signal hvert sekund. Dette kobles til flip-flop- noden, som skifter frem og tilbake mellom sant og usant hver gang det mottar signalet. Flip-flop-utgangen kobles til lednoden, slår den av og på.
Klikk på led-noden, så ser du inspektørruteendringene for å vise parametrene. Endre porten til 13 som vist ovenfor, pinnen med en innebygd LED på en Arduino. Legg merke til at Xod automatisk blir 13 til D13 . Du trenger ikke å skrive D selv, men det gjør ingen forskjell for denne opplæringen hvis du gjør det!
For å teste om det fungerer å koble din Arduino via USB, kan du gå til Distribusjon> Last opp til Arduino og velge riktig bordtype og COM-port.

Hvis du ser Arduino-LED-en blinkende, er du god til å gå! Hvis ikke, sjekk brettet og portnummeret og test igjen før du fortsetter.
Programmering av LCD-skjermen
Vanligvis vil vi komme inn på den lange prosessen med koding nå, men siden vi bruker Xod, skriver vi ikke noe. I prosjektleseren velger du text-lcd-16 × 2 - du finner den under xod / common-hardware . Dra det inn i programmet ditt, og bruk Inspector til å sette det opp med pinnene som vist.

L1 er den første linjen på LCD-skjermen, og L2 er den andre, for nå har vi hardkodet “Hello World” for å sjekke at alt fungerer. Distribuer programmet ditt til Arduino for å se at det fungerer. Hvis teksten din er vanskelig å se, kan du prøve å vri på 10 000 potensiometer for å justere LCD-kontrasten.

Nå for å sette opp distansesensoren, og få den til å snakke med LCD-skjermen.
Avstandsfølelse
Dra hc-sr04-ultralydområdet til prosjektet ditt, og sett TRIG- og ECHO- pinnene til 7 og 8 for å samsvare med hvordan du konfigurerte det tidligere.

Du finner concat- noden under xod / core i prosjektleseren. Dra den mellom ultralydsområdesensornoden og LCD-noden. Du vil bruke dette til å slå sammen (som er et fancy ord for å kombinere) avlesningen av rekkevidden sensor med litt tekst.
Dette bildet viser hva som skjer. Dm- utgangen fra områdesensornoden er koblet til IN2, og du kan se at inspektøren markerer den som koblet . Skriv "Distance:" i IN1- boksen. Nå kobler du utgangen fra concat-noden til L1 på LCD-noden.

Lagre og distribuer det endrede programmet. Den øverste linjen på LCD-skjermen viser nå avlesningen fra områdesensoren!

Servo Setup
Å få servoen i gang krever tre deler, så la oss gå gjennom dem en etter en. Begynn med å dra en kartklippnode fra xod / matematikk til programmet ditt. Denne noden tar informasjon fra Dm- utgangen til rekkevidden sensor-noden og kartlegger den til verdier servoen forstår.

Smin og Smax representerer minimums- og maksimumsområdet for å aktivere servoen, i dette tilfellet mellom 5 og 20 cm. Disse verdiene er kartlagt til Tmin og Tmax, som er satt til 0 og 1 som minimums- og maksimal servoposisjon.

Fade- noden under xod / core tar utgangsverdien til kartklippnoden og jevner den med en definert hastighet . Dette forhindrer uønsket rykkende servobevegelse. En hastighet på 2 er en god balanse, men du kan eksperimentere med forskjellige verdier her for å få servoen til å reagere raskere og tregere.

Til slutt tar servo- noden, som du finner under xod-dev / servo, utgangsverdien fra fade-noden. Endre porten til 10 . Du kan forlate UPD kontinuerlig, da vi ønsker at servoen vår kontinuerlig skal oppdateres basert på avstandsføleren.

Lagre skriptet ditt og distribuer det til Arduino-brettet. Prototypen din robotarm er ferdig!
Test det ut

Når du nå plasserer noe i nærheten av avstandsføleren, logger LCD-en avstanden, og servoen beveger seg proporsjonalt med den detekterte avstanden. Alt dette uten kode i det hele tatt.

Hele node-treet viser hvor enkelt det er å lage komplekse programmer i Xod. Hvis du har noen problemer, må du kontrollere både kretsen og hver node nøye for feil.
The No-Code Arduino Robot
Xod gjør det mulig for hvem som helst å programmere Arduino-tavler, uansett kodingskunnskap. Xod jobber til og med Blynk DIY IoT-appen, noe som gjør en komplett kodefri DIY smarthus til en reell mulighet.
Selv med verktøy som Xod, er læring å kode viktig for DIY-prosjekter. Heldigvis kan du lære kode på smarttelefonen. Vil du lære grunnleggende koding? Prøv 5 bit-størrelse kodingsapper på fritiden Vil du lære grunnleggende koding? Prøv 5 bit-størrelse kodingsapper på fritiden Vil du lære grunnleggende koding, men har lite tid? Disse kodingsappene for bite-størrelse vil ta opp bare noen få minutter av din travle dag. Les mer for å finne det grunnleggende!
Utforsk mer om: Arduino, Integrert utviklingsmiljø, robotikk.

